La robotique,
est l’ensemble des disciplines techniques pour mettre au
point des robots. La robotique est le futur. Ceux qui naissent maintenant vont vivres avec
la robotique. Bien ou mal...?
- Jusque dans les années 60,
le terme robotique était plus
de la science-fiction qu’une réalité. Puis, après avoir été essentiellement un
domaine de recherche scientifique, la robotique a fait son apparition dans
l’industrie.
- Ce domaine scientifique
étudie les mécanismes, les capteurs, les actionneurs, les méthodes de commande
et le traitement de l’information nécessaires à la conception et l’utilisation
des robotsy compris leurs déplacements.
- Actuellement,
de plus en plus de robots sont créés dont la technicité et les compétences
s’améliorent régulièrement.
Dans le domaine industriel,
la robotique produit:
des automates réalisant des fonctions précises sur des chaînes de montage et
aussi des engins capables de se mouvoir dans différents milieux : dangereux
(pollués, radioactifs…), aérien, sous-marins, spatiaux… Outre l’industrie, la
robotique concerne ainsi aujourd’hui la recherche scientifique, l’exploration
spatiale et les activités de défense militaire ou de maintien de l’ordre. Elle
intéresse également le secteur médical, pour les prothèses, les assistance aux
chirurgiens ou aux infirmiers. La robotique s’est également étendue récemment
au marché grand-public avec des engins autonomes pour assurer seuls certaines
fonctions (aspirateurs, tondeuses à gazon…) ou pour des activités ludiques
(robots compagnons, robots jouets…).
source : sites.google.com/site/techno3bg1robot
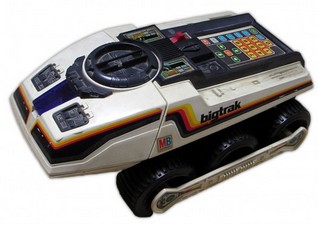
Le Bigtrak est le 1er jouet
utilisant l’intelligence artificiel. C’était un véhicule robotisé pour les enfants des années 80 !
Son prix était super cher, mais cela semblait le jouet nécessaire !
C’était le premier véhicule électronique entièrement programmable.
Le jouet Furby : de 1998 ,parlais, chantait,
dialoguait avec un ou plusieurs autres. c'était un plaisir à les écouter en les
plaçant a 2 On nomme robot un dispositif
mécanique accomplissant automatiquement
des tâches généralement considérées comme dangereuses, pénibles ou impossible
pour les humains.
Le terme robot correspond à un type bien précis de
système.
La définition la plus
précise du robot pourrait être : «Système automatique mécanisé capable
d’effectuer une ou plusieurs tâches, dans un environnement donné, de manière
autonome, par l’exécution d’un programme ».
Un avion de ligne n’est pas un
robot, alors qu’un banal grille-pain peut être appelé robot.
En effet, un avion de ligne, reste sous le contrôle des pilotes qui
demeurent en haut de la pyramide hiérarchique des systèmes.
En revanche, le grille-pain va effectuer, une fois démarré, une tâche certes
unique, très simple, mais de façon entièrement autonome et sans aucune
intervention extérieure, exécutant un programme, une suite d’instructions: en
effet, le thermostat qui coupe le circuit de chauffe et éjecte les
tranches de pain dès que le temps de cuisson est écoulé peut être considéré
comme une unité d’entrée, tandis que la valeur du réglage peut être considérée
comme une variable du programme à exécuter. Ainsi
le robot, machine programmable,
ne peut être séparé de l’ordinateur,
et à cet égard doit être défini comme une unité d’entrée/sortie, un
périphérique (un clavier ou autre). Quelle que soit la complexité du logiciel
lui permettant de réagir à son environnement, le robot est piloté, exactement
comme une imprimante qui exécute une suite de tâches programmées.
Le robot reste donc une machine informatisée, dont il n’est qu’un élément. Selon
cette définition, on peut considérer, même si cette distinction est quelque peu
académique, que des systèmes , même complexes, téléguidés par un opérateur
humain ne sont pas, justement, de véritables robots. En revanche, des
systèmes automatisés comme certaines sondes spatiales, certains drones et les
missiles de croisières, constituent bien des robots.
Ici au dessus, une partie
des lignes de programmation d'un robot
Ce texte est simplifié et raccourci de
la source : //www.robotbuzz.fr/la-robotique/
Voila 40 ans que l'industrie automobile
à recours aux robots en production, ce qui a entraîné de
nombreux changements. Les modèles coûteux de l'époque ont laissé la place à des robots de pointe
fiables et polyvalents
- En 1948 Norbert Wiener -
définit une science qui
étudie exclusivement les communications et leurs régulations dans les
systèmes chez les êtres vivants et dans les machines.
La cybernétique, à
pour l’objectif de rendre les machines intelligentes.
Le terme «Cybernétique"
a été popularisé se référèrent au concept
d'un humain « amélioré »qui pourrait
survivre dans des environnements extraterrestres. Ce concept est le résultat
d'une réflexion sur la nécessité d'une relation intime entre l'humain et la
machine, à l'heure des débuts de l'exploration spatiale. "cyborg" est un être
humain (re) construit ) — ou à la rigueur, en
science-fiction, un autre être vivant intelligent. — qui a reçu des greffes
de parties mécaniques. Le terme s'emploie surtout en science-fiction ou en
futurologie; utiliser le terme 'cyborg" pour des personnes ayant reçu des
prothèses, dans le monde contemporain, peut parfois être perçu comme de mauvais
goût par les intéressés.
On s’est vite aperçu aussi que
l’ordinateur ne pouvait prétendre simuler des comportements complexes
d’intelligence humaine, alors seul
le mot d’ «intelligence artificielle» a subsisté, et la « cybernétique » a
disparu, sauf chez quelques super-héros du cinéma américain, cyborgs ou autres
Terminators.
Comparé à d'autres inventions techniques le robot est une invention jeune.
Depuis la production de
son premier robot industriel, en 1973
"Faumulus" L'entreprise Kuka a beaucoup apporté en matière de solutions
d'automatisation de pointe sur tous les processus de production. En 2001, KUKA a
développé le Robocoaster, Robot de transport de passager!
L'Automate est un dispositif se comportant de manière automatique,
c'est-à-dire sans l'intervention d'un humain. Ce comportement peut être figé, le
système fera toujours la même chose, ou bien peut s'adapter à son
environnement.
Vers -150 avant notre
ère Héron d'Alexandrie,
(d'origine égyptienne) crée une machine à vapeur et l'utilise pour animer des
figurines qui marchent toutes seules, ou pour faire ouvrir automatiquement des
portes des temples.
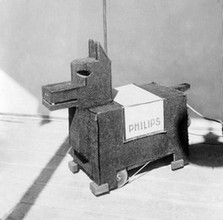
Les automates autorégulés
forment la base de la cybernétique. Ici les automates ne se contentent pas
d’effectuer des mouvements préprogrammés, mais interagissent avec leur
environnement, qui les gouverne. Quelques exemples :
Le chien électrique de Hammond et Miessner (1915) se guide à la lumière, tout
comme Philidog, le chien de Henri Piraux (1928) et le renard de Ducrocq (1953).
Source des images : le zoo cybernétique (en anglais)
Un des
automates
les plus surprenants est certainement
le canard digérateur
de Jacques de Vaucanson
(1738).
Capable de boire, manger, cancaner et digérer comme un véritable animal, il fut
malheureusement détruit dans un incendie au milieu du XIXème siècle et il n’en
reste que des photographies (source Wikimedia commons). Vers 1740,
Jacques de Vaucanson conçut et construisit un automate
joueur de flûte, et ce canard automatique et le premier
métier à tisser automatique programmable.
À partir des années 1900,
l'engouement du public pour les automates disparaît peu à peu. Dès lors commence
la véritable histoire de la robotique vers 1915 avec
Hammond et Miessner qui équipent un chien électrique d'un capteur pour le faire
se diriger vers la lumière. Ce chien est assimilable aux futurs robots. En
effet, étant équipé d'un organe sensoriel recueillant des informations de
l'extérieur, il est capable d'influencer son comportement en fonction de ces
informations. Il se distingue ainsi d'un simple automate.
Un androïde"
désigne ce qui est construit à
l'image d'un homme,
étymologiquement
ce "qui ressemble à un humain
On n'hésite pas non plus à parler
"Ganoïde"
pour la représentation d'une femme. Le terme
"Anthropoïde" aussi employé est préférable, car neutre. Seule terme
"androïde" est devenu populaire et évoque spontanément
l'image d'une machine.. "Anthropomorphes" doit être employé pour
Extra-terrestres!
Le premier robot humanoïde
est probablement du à Léonard De Vinci,
qui présenta en
1495
un chevalier en armure capable
de s’asseoir, relever sa visière et bouger ses
bras(voir ici photo). Après avoir découvert ses notes et
schémas en 1950, réplique fonctionnelle fut construite et exposée au musée de
Berlin.
Source de l’image :
Wikipedia
- Electro -
-Construit
par Westinghouse Electric Corporation. Entre
1937
à 1939
(2m10 de haut. 121 kg. Il pouvait marcher par commande
vocale, parler 700 mots (pour cela il utilisait 78 tourne- disque de cette
époque!) fumer des cigarettes, gonfler des ballons bouger la tête, les bras et
le corps.
Il a était exposé à la foire mondiale de New York 1939.
puis plus tard (1940)
on lui a donner "Sparko" un chien qui pouvait aboyer, s'asseoir et mendier. Conçu entre
1950 et 1953par Albert Ducrocq, le renard électronique,
surnommé « Job »(ci-dessous)
est un représentant des machines expérimentales apparues à la fin de la Seconde
Guerre mondiale dans le cadre de la cybernétique. Job est équipé de deux
cellules photoélectriques montées dans la tête qui font office d’organes de la
vue, d’un microphone qui constitue son oreille, tandis que le toucher lui vient
de capteurs qui réagissent au contact d’obstacles. Des contacts placés dans le
cou lui donnent le sens de l’orientation. Il dispose de plus d’un « flair
capacitif » qui lui permet de reconnaître un obstacle à distance. En outre, Job
est capable d’apprendre grâce à une « mémoire » et deux lampes s’allumant au
sommet de sa tête lui permettent de s’exprimer.
Norbert Wiener
le renard électronique
Des essais
Image sous licence
/by-sa/3.0"title" creative commons Attribution-Share Alike- CC BY-SA
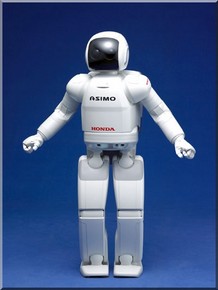
En bleu (Asimo)
Robot le plus perfectionné au monde (dans ses mouvements et sa vision
surtout) - et Nao .
Voir Vidéos ASIMO
youtu.be/6lmh32xLvJE
A voir! Bien sur, sans sa programmation ce robot ne chanterait pas et ne ferait,
pas de lui même, tout ça! ce robot est la même plate forme que le robot femme à
gauche ci-au-dessus, c'est une carcasse habillée de diverses façons (comme
images ici (au dessus)
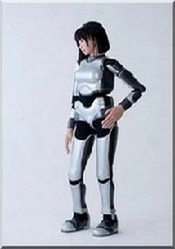
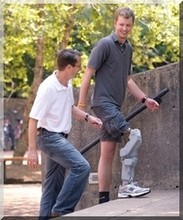
L'exosquelette motorisé
ou combinaison robotique
(piloté de l'intérieur)
est un dispositif mécatronique
à base fixe ou
mobile, composé d'une structure mécanique à plusieurs degrés de liberté, d'un
système d'actionnement (électrique, hydraulique ou pneumatique) utilisant une
source d'énergie embarquée ou déportée, et de cartes électroniques de puissance
et de commande, que revêt un individu, à la manière d'un vêtement robotisé ou
d'une prothèse externe (ou encore d'une cyberthèse), pour lui permettre de
démultiplier ses capacités physiques (amplification), de simuler un retour
d'effort dans un environnement virtuel (immersion), de rééduquer son système
musculosquelettique (réhabilitation), de contrôler à distance des systèmes
robotiques (téléopération)
L'exosquelette,
sert à aider un humain dans ses
mouvements ou à remplacer une partie de son corps. Il ne sert pas à
la production.
Le mot
« cobotique » vient de
Cooperative Robotics. Cette discipline se caractérise par l'interaction, directe
ou à distance, entre un opérateur et un système robotique. On distingue
plusieurs types de cobots : ceux pilotés par un opérateur situé à proximité
immédiate du système, d'autres commandés à plus grande distance (ou téléopérés)
et les exosquelettes, sortes de prolongements du corps humain.
La
cobotique, peut donc être conçue comme une
robotique coopérative, c'est-à-dire l'utilisation ou le recours à des systèmes de suppléance mécaniques
développés pour travailler avec l’homme, l'accompagner et
l’aider dans les tâches ou des situations particulières.
Le
Cobot,
est un assistant piloté de
l'extérieur.
Baxter -ci-dessus en rouge-
(robot) capable de
travailler avec de humains en toute sécurité, voit ses performances améliorées.
Une récente mise à jour du robot collaboratif le plus avancé de sa génération
vient d’être annoncée par son constructeur Rethink Robotics. Il peut maintenant
plier une chemise, préparer le café et même résoudre un Cube, et sans oublier sa
fonction principale : mieux collaborer avec les humains. Cette
collaboration met en œuvre des robots opérant sans barrière, au contact des
opérateurs ou d'autres humains travaillant dans le même espace. Elle permet de
ce fait un partage de l’activité, les capacités physiques et cognitives de
l’homme avec la machine. Pour faire exécuter les tâches que l’on veut à Baxter,
il « suffit » de lui montrer les gestes à effectuer. En déplaçant physiquement
les deux bras du robot, celui-ci enregistre l’enchaînement des mouvements et
sait les reproduire de manière répétable et répétée par la suite. Les capteurs
de ces robots sont leurs nerfs, mais ils ne seraient rien sans intelligence
embarquée ou sans puissance de calcul.
Capteurs et intelligence permettent au
robot de détecter l'intention de l'homme (un exosquelette doit par exemple
calculer en temps réel la trajectoire voulue par l'homme) mais aussi d'apprendre
de leur expérience. L'institut de robotique de l'université de Carnegie Mellon
(États-Unis) travaille sur un processus de traitement des informations pour que
les robots appréhendent mieux leur environnement.
Ce processus, dit LROD (Lifelong robotic
object discovery), permet à un robot mobile doté de deux bras, d'une vidéo en
couleur, d'une caméra Kinect et d'un recueil d'autres informations non-visuelles
de découvrir par lui-même une centaine d'objets dans un laboratoire agencé comme
une maison, où sont placés des capteurs. (repères pour le robot)
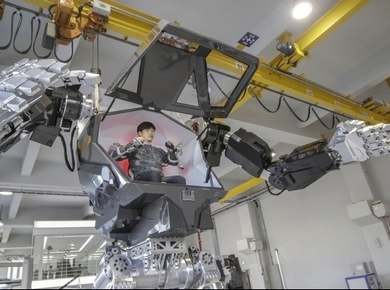
Le robot
méthode-2 (Comme dans le film "Avatar") - 2017
1,5 tonnes, 4 m de
haut. ainsi que bouger ses bras, ses poignets et ses doigts.
Le pilote se glisse dans le torse dans la partie haute.
Un de ses concepteurs, Vitaly Bulgaro,
créateur d'engins futuriste pour les films comme: Avatar, transformers,
Terminator. Ce rebot est destiné a aider l'homme dans des environnements
difficiles Vu sur
Sciences et Avenir et avec Google.
Robot c'est aussi ça!
Robot de combat Aspirateur
Robot moto
Drone Pour madame
Pepper
Aide Hanicapé Gardien en service.
Robot Chirurgien (piloté)
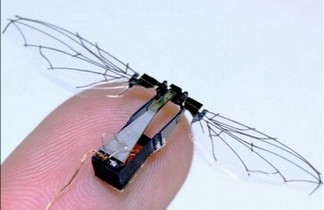
de l’Université
de Harvard, envisagent d’utiliser Robot Fly pour polliniser les plantes
Libellule augmentée (cyborg)
Une véritable libellule. pourrait être utilisée
pour transporter de petites charges,
faire de la reconnaissance, et même devenir
pollinisatrice.
Robot Tatoueur
De la Robotique pour exploitations agricole - et dans nos rues -c'est parti.
-Durant plusieurs millénaires,
les automates ont reposé sur des ressorts,
engrenages et autres mécanismes, ce
qui ne les a pas empêché d'atteindre une grâce qui force l'admiration. Et puis
l'informatique est venue changer la donne en permettant de stocker de très
larges quantités d'informations et de séquences d'actions dans une petite puce.
Le robot est ainsi arrivé à une sophistication telle qu'il peut désormais tenter
de trouver par lui-même la solution de certains problèmes.
Cowarobot est une valise
connectée et motorisée, capable de suivre de façon
autonome l’utilisateur et même contourner les obstacles qui se trouvent sur son
chemin. Ce dispositif s’avère très utile pour se libérer les mains à l’aéroport
et en voyage. Comme, lorsqu’il y a trop de sacs à porter, ou lorsqu’il faut
marcher de longues distances d’un terminal à un autre, ou encore pour porter des
enfants dans les bras.
La valise fonctionne de paire avec un bracelet connecté
et une application mobile. Ces deux éléments
associés à la balise permettent de prendre le contrôle du bagage. Le robot Gita
est fait pour vous aider. Cette valise autonome peut porter jusqu’à 18 kg
d’affaires et se déplacer à une vitesse maximum de 35 km/h. Elle est développée
par Piaggio Fast Forward, une filiale innovation du groupe italien Piaggo,
célèbre pour ses scooters de marque Vespa.
Gita
est capable d’évoluer sur plusieurs types de surface et même dans certains
environnements difficiles. Elle dispose de deux roues qui lui permettent de se
déplacer, et même de tourner autour d’elle-même.
L’engin dispose par ailleurs d’un laser lidar (une sorte de radar) et de caméras
360° qui ont pour rôle de cartographier l’environnement dans lequel il évolue.
Il est ainsi capable de générer une carte 3D pour s’orienter


 Le Bigtrak est le 1er jouet
utilisant l’intelligence artificiel. C’était un véhicule robotisé pour les enfants des années 80 !
Le Bigtrak est le 1er jouet
utilisant l’intelligence artificiel. C’était un véhicule robotisé pour les enfants des années 80 ! Ainsi
le robot, machine programmable,
ne peut être séparé de l’ordinateur,
et à cet égard doit être défini comme une unité d’entrée/sortie, un
périphérique (un clavier ou autre). Quelle que soit la complexité du logiciel
lui permettant de réagir à son environnement, le robot est piloté, exactement
comme une imprimante qui exécute une suite de tâches programmées.
Le robot reste donc une machine informatisée, dont il n’est qu’un élément. Selon
cette définition, on peut considérer, même si cette distinction est quelque peu
académique, que des systèmes , même complexes, téléguidés par un opérateur
humain ne sont pas, justement, de véritables robots. En revanche, des
systèmes automatisés comme certaines sondes spatiales, certains drones et les
missiles de croisières, constituent bien des robots.
Ainsi
le robot, machine programmable,
ne peut être séparé de l’ordinateur,
et à cet égard doit être défini comme une unité d’entrée/sortie, un
périphérique (un clavier ou autre). Quelle que soit la complexité du logiciel
lui permettant de réagir à son environnement, le robot est piloté, exactement
comme une imprimante qui exécute une suite de tâches programmées.
Le robot reste donc une machine informatisée, dont il n’est qu’un élément. Selon
cette définition, on peut considérer, même si cette distinction est quelque peu
académique, que des systèmes , même complexes, téléguidés par un opérateur
humain ne sont pas, justement, de véritables robots. En revanche, des
systèmes automatisés comme certaines sondes spatiales, certains drones et les
missiles de croisières, constituent bien des robots.

 Voila 40 ans que l'industrie automobile
Voila 40 ans que l'industrie automobile
 - En 1948 Norbert Wiener -
- En 1948 Norbert Wiener -
 Comparé à d'autres inventions techniques le robot est une invention jeune.
Depuis la production de
son premier robot industriel, en 1973
"Faumulus" L'entreprise Kuka a beaucoup apporté en matière de solutions
d'automatisation de pointe sur tous les processus de production. En 2001, KUKA a
développé le Robocoaster, Robot de transport de passager!
Comparé à d'autres inventions techniques le robot est une invention jeune.
Depuis la production de
son premier robot industriel, en 1973
"Faumulus" L'entreprise Kuka a beaucoup apporté en matière de solutions
d'automatisation de pointe sur tous les processus de production. En 2001, KUKA a
développé le Robocoaster, Robot de transport de passager! Un des
automates
les plus surprenants est certainement
le canard digérateur
de Jacques de Vaucanson
(1738).
Capable de boire, manger, cancaner et digérer comme un véritable animal, il fut
malheureusement détruit dans un incendie au milieu du XIXème siècle et il n’en
reste que des photographies (source Wikimedia commons). Vers 1740,
Jacques de Vaucanson conçut et construisit un automate
joueur de flûte, et ce canard automatique et le premier
métier à tisser automatique programmable.
Un des
automates
les plus surprenants est certainement
le canard digérateur
de Jacques de Vaucanson
(1738).
Capable de boire, manger, cancaner et digérer comme un véritable animal, il fut
malheureusement détruit dans un incendie au milieu du XIXème siècle et il n’en
reste que des photographies (source Wikimedia commons). Vers 1740,
Jacques de Vaucanson conçut et construisit un automate
joueur de flûte, et ce canard automatique et le premier
métier à tisser automatique programmable.
 À partir des années 1900,
l'engouement du public pour les automates disparaît peu à peu. Dès lors commence
la véritable histoire de la robotique vers 1915 avec
Hammond et Miessner qui équipent un chien électrique d'un capteur pour le faire
se diriger vers la lumière. Ce chien est assimilable aux futurs robots. En
effet, étant équipé d'un organe sensoriel recueillant des informations de
l'extérieur, il est capable d'influencer son comportement en fonction de ces
informations. Il se distingue ainsi d'un simple automate.
À partir des années 1900,
l'engouement du public pour les automates disparaît peu à peu. Dès lors commence
la véritable histoire de la robotique vers 1915 avec
Hammond et Miessner qui équipent un chien électrique d'un capteur pour le faire
se diriger vers la lumière. Ce chien est assimilable aux futurs robots. En
effet, étant équipé d'un organe sensoriel recueillant des informations de
l'extérieur, il est capable d'influencer son comportement en fonction de ces
informations. Il se distingue ainsi d'un simple automate. Le premier robot humanoïde
est probablement du à Léonard De Vinci,
Le premier robot humanoïde
est probablement du à Léonard De Vinci, à 1939
(2m10 de haut. 121 kg. Il pouvait marcher par commande
vocale, parler 700 mots (pour cela il utilisait 78 tourne- disque de cette
époque!) fumer des cigarettes, gonfler des ballons bouger la tête, les bras et
le corps.
Il a était exposé à la foire mondiale de New York 1939.
puis plus tard (1940)
on lui a donner "Sparko" un chien qui pouvait aboyer, s'asseoir et mendier. Conçu entre
1950 et 1953par Albert Ducrocq, le renard électronique,
surnommé « Job »(ci-dessous)
est un représentant des machines expérimentales apparues à la fin de la Seconde
Guerre mondiale dans le cadre de la cybernétique. Job est équipé de deux
cellules photoélectriques montées dans la tête qui font office d’organes de la
vue, d’un microphone qui constitue son oreille, tandis que le toucher lui vient
de capteurs qui réagissent au contact d’obstacles. Des contacts placés dans le
cou lui donnent le sens de l’orientation. Il dispose de plus d’un « flair
capacitif » qui lui permet de reconnaître un obstacle à distance. En outre, Job
est capable d’apprendre grâce à une « mémoire » et deux lampes s’allumant au
sommet de sa tête lui permettent de s’exprimer.
à 1939
(2m10 de haut. 121 kg. Il pouvait marcher par commande
vocale, parler 700 mots (pour cela il utilisait 78 tourne- disque de cette
époque!) fumer des cigarettes, gonfler des ballons bouger la tête, les bras et
le corps.
Il a était exposé à la foire mondiale de New York 1939.
puis plus tard (1940)
on lui a donner "Sparko" un chien qui pouvait aboyer, s'asseoir et mendier. Conçu entre
1950 et 1953par Albert Ducrocq, le renard électronique,
surnommé « Job »(ci-dessous)
est un représentant des machines expérimentales apparues à la fin de la Seconde
Guerre mondiale dans le cadre de la cybernétique. Job est équipé de deux
cellules photoélectriques montées dans la tête qui font office d’organes de la
vue, d’un microphone qui constitue son oreille, tandis que le toucher lui vient
de capteurs qui réagissent au contact d’obstacles. Des contacts placés dans le
cou lui donnent le sens de l’orientation. Il dispose de plus d’un « flair
capacitif » qui lui permet de reconnaître un obstacle à distance. En outre, Job
est capable d’apprendre grâce à une « mémoire » et deux lampes s’allumant au
sommet de sa tête lui permettent de s’exprimer.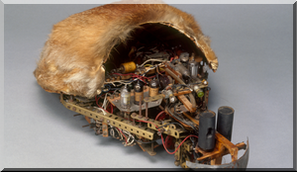




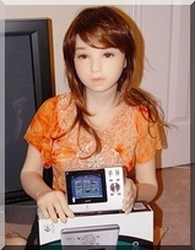

 Ucroa ou HRP 4C Robot qui chante et danse (japon)
Ucroa ou HRP 4C Robot qui chante et danse (japon)






.jpg)











 Robot de combat Aspirateur
Robot moto
Robot de combat Aspirateur
Robot moto






 faire de la reconnaissance, et même devenir
pollinisatrice.
Robot Tatoueur
De la Robotique pour exploitations agricole - et dans nos rues -c'est parti.
faire de la reconnaissance, et même devenir
pollinisatrice.
Robot Tatoueur
De la Robotique pour exploitations agricole - et dans nos rues -c'est parti.

 Cowarobot est une valise
connectée et motorisée, capable de suivre de façon
autonome l’utilisateur et même contourner les obstacles qui se trouvent sur son
chemin. Ce dispositif s’avère très utile pour se libérer les mains à l’aéroport
et en voyage. Comme, lorsqu’il y a trop de sacs à porter, ou lorsqu’il faut
marcher de longues distances d’un terminal à un autre, ou encore pour porter des
enfants dans les bras.
Cowarobot est une valise
connectée et motorisée, capable de suivre de façon
autonome l’utilisateur et même contourner les obstacles qui se trouvent sur son
chemin. Ce dispositif s’avère très utile pour se libérer les mains à l’aéroport
et en voyage. Comme, lorsqu’il y a trop de sacs à porter, ou lorsqu’il faut
marcher de longues distances d’un terminal à un autre, ou encore pour porter des
enfants dans les bras. Gita
est capable d’évoluer sur plusieurs types de surface et même dans certains
environnements difficiles. Elle dispose de deux roues qui lui permettent de se
déplacer, et même de tourner autour d’elle-même.
Gita
est capable d’évoluer sur plusieurs types de surface et même dans certains
environnements difficiles. Elle dispose de deux roues qui lui permettent de se
déplacer, et même de tourner autour d’elle-même.